
Stm32单片机
STM32F103CBT6
STM32串口通信
串口通信比较好的学习链接:串口通信
串口通信通常是1V1通信,一段发送一段接受,也可以双向通信
常见串口通信的模式:
1.全双工:即可以接受又可以发送
2.半双工:即可以接受又可以发送,但是不能同时进行
3.单工:只能单向传输数据,只有一方能够发送数据,另外一方只能接受数据
串口通信的数据格式
串口通信的数据格式有:起始位,数据位,校验位,停止位,数据帧位,波特率
比喻:
可以把串口通信比喻成邮递包裹的过程
数据位就如图快递包裹的标签中的信息,起始位则是邮递员的开场白,告诉另一个设备说我要传输数据了,而停止位就想邮递员确认签收,,而校验位则是确认包裹内容有没有被篡改或丢失
在串口通信中,数据位就像是包裹中的“数字标签”,它们承载着实际的信息内容。在一个数据帧中,起始位和停止位则是运输包裹的“标记”,校验位是确保包裹完好无损的“安全封条
关于串口通信中的中断
接受中断(RX Interrupt): 每当串口接收到一个字节的数据时,就会触发接收中断。
发送中断:当串口发送缓冲区空闲时触发。即,当数据寄存器可以再发送一个字节时,会触发中断。
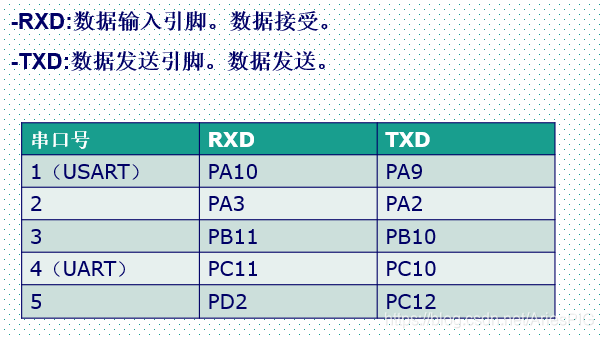
串口通信中的USART模块
串口中断常用函数
1 | HAL_UARTEx_ReceiveToIdle_DMA(&huart1, uart_int, 8);//用处:开启接收 |
定时器
关于定时器的基础简绍
定时器的频率:是指一秒钟执行的次数
HAL库TIM中的一些函数
1 |
|
定时器中的中断回调函数
基本定时器:
基本定时器中断
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)函数的中断设置
中断优先级的设置
SPI
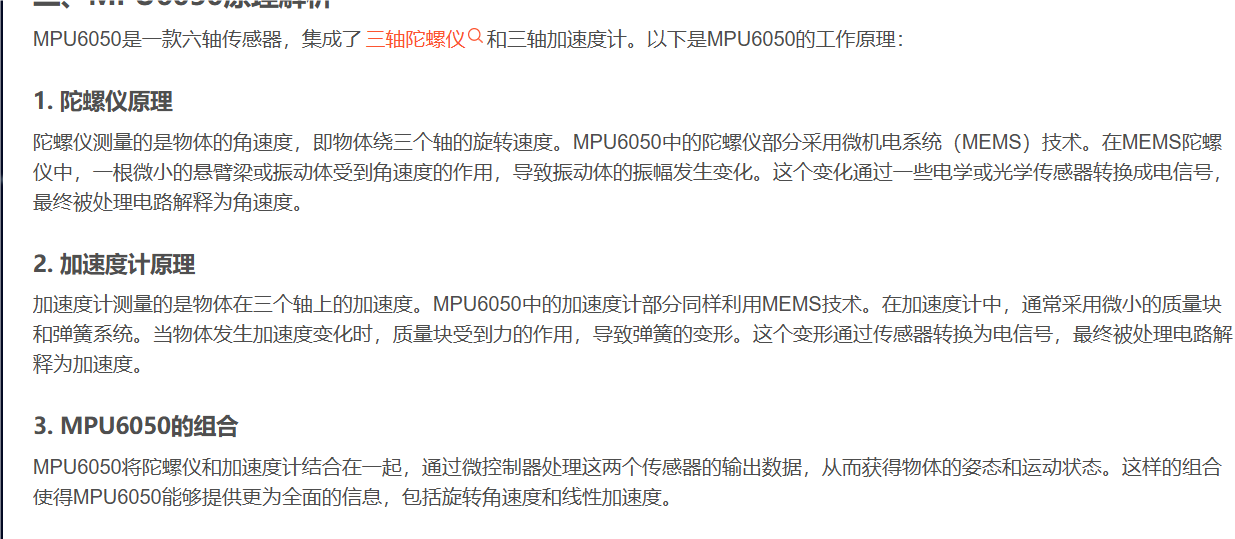
陀螺仪
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 春之雪!
评论




